where
![]() and
and
 .
.
If
![]() , we can rewrite
, we can rewrite ![]() as
as
 .
.
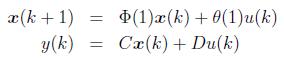
Equation (4) has a similar form as that of equation (3) if we consider
![]() and
and
![]() . Similarly by setting t = kT , one can show that the output equation also has a similar form as that of the continuous time one.
. Similarly by setting t = kT , one can show that the output equation also has a similar form as that of the continuous time one.
When T = 1,
2.2 State Equations of Inherently Discrete Systems
When a discrete system is composed of all digital signals, the state and output equations can be described by