Now,
Using MATLAB command ``margin'', phase margin of the system with K = 2 is computed as 31.6° with ωg = 1.26 rad/sec, as shown in
Figure 3.
![\includegraphics[width=4.in]{m5l6fig1a.eps}](images/img83a.png)
Thus the required phase lead is 50° - 31.6° = 18.4° . After adding a safety margin of 11.6° , ![]() becomes 30° . Hence
becomes 30° . Hence

From the frequency response of the system it can be found out that at ω = 1.75 rad/sec, the magnitude of the system is  . Thus ωmax = ωgnew = 1.75 rad/sec. This gives
. Thus ωmax = ωgnew = 1.75 rad/sec. This gives
Or, 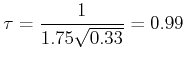
Thus the controller in w-plane is
The Bode plot of the compensated system is shown in Figure 4.
![\includegraphics[width=4.2in]{m5l6fig1b.eps}](images/img93.png)
Re-transforming the above controller into z -plane using the relation  , we get the controller in z -plane, as
, we get the controller in z -plane, as