1.2 Root locus diagram of digital control systems
We will first investigate the effect of controller gain K and sampling time T on the relative stability of the closed loop system as shown in Figure 1.
 |
Figure 1: A discrete time control system
Let us first take T=0.5 sec.
Let us assume that the controller is an integral controller, i.e., 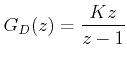 . Thus,
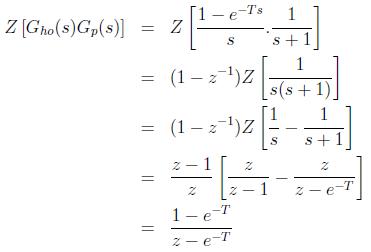
. Thus,
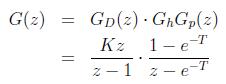
The characteristic equation can be written as
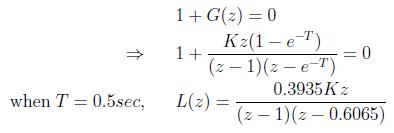
![]() has poles at z = 1 and z = 0.605 and zero at z = 0.
has poles at z = 1 and z = 0.605 and zero at z = 0.
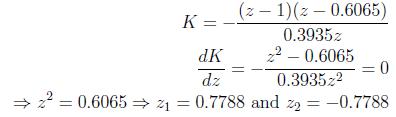
Break away/ break in points are calculated by putting  .
.