We can write from equation (3),
 |
|||
 |
Taking pulse transformation on both sides of (2)
 |
 |
 |
||
 |
 |
where
![]() .
.
![]()
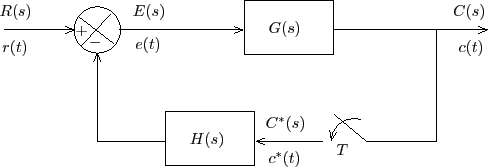
Now, if we place the sampler in the feedback path, the block diagram will look like the Figure 2.
 |