The OBDDs for {S1,S2} and {S1,S2,S3} are shown in Figure 2 and Figure 3, respectively. The OBDDs for other subsets can also be similarly constructed.
.................................................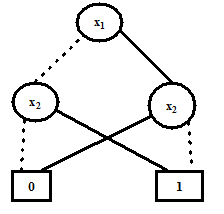
Figure 2. ROBDD for {s 1 ,s 2 }
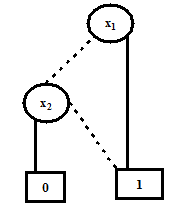
Figure 3. ROBDD for {s 0 , s 2 , s 3 }
3. Representing transitions using OBDDs
We have seen how to represent subsets of sets of states using OBDDs. We can even represent transitions using OBDDs. For representing transitions, we need to use more variables. For example, if n variables were initially used to represent the states, now we need to have n more variables. Suppose, initially we used variables X1,X2,X3,X4,.....................,.Xn, to represent the states, now let us introduce more variables ![]() so that we are able to represent the state transitions. X1,X2,X3,X4,.....................,.Xn are used to represent the current state of the transition and
so that we are able to represent the state transitions. X1,X2,X3,X4,.....................,.Xn are used to represent the current state of the transition and ![]() are used to represent the next state of the transition. So, we need to introduce
are used to represent the next state of the transition. So, we need to introduce![]() in the state transition graph of Figure 1 to represent the transitions. We represent the transitions as follows.
in the state transition graph of Figure 1 to represent the transitions. We represent the transitions as follows.
If s 0 occurs as a next state, then we use ![]() to represent that. Similarly s 1 , s 2 and s 3 in next states are represented by
to represent that. Similarly s 1 , s 2 and s 3 in next states are represented by![]() respectively. Thus,
respectively. Thus,
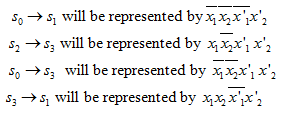
Similarly, we can represent other transitions. Thus, we can represent all transitions by Boolean functions. Thus, we can construct OBDDs for transitions also. A state transition graph (STG), which is used to represent sequential circuits is just a subset of all possible transitions. For example, in the above case (Figure 1), where there were 4 states s 0, s 1, s 2 and s 3 , 16 possible transitions may be there. The STG will contain only some of those transitions. The STG shown in Figure 1, consists of the transitions
![]() So, the STG can be represented by Boolean expression:
So, the STG can be represented by Boolean expression: ![]()
The ROBDD for f , i.e., B f is shown in Figure 4.
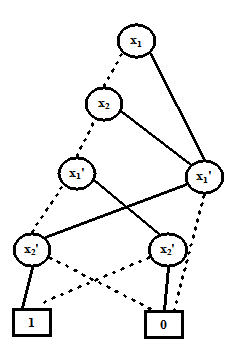
Figure 4. ROBDD for the f , i.e., B f