Car following theories describe how one vehicle follows another vehicle in an
uninterrupted flow. Various models were formulated to represent how a driver
reacts to the changes in the relative positions of the vehicle ahead.
Models like Pipes, Forbes, General Motors and Optimal velocity model are worth
discussing.
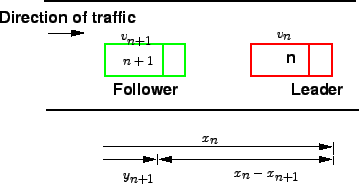
Before going in to the details, various notations used in car-following models
are discussed here with the help of figure 1.
The leader vehicle is denoted as and the following vehicle as . Two
characteristics at an instant are of importance; location and speed.
Location and speed of the lead vehicle at time instant are represented by
and respectively. Similarly, the location and speed of the
follower are denoted by and respectively.
The following vehicle is assumed to accelerate at time
and not at
, where is the interval of time required for a driver to react to
a changing situation.
The gap between the leader and the follower vehicle is therefore
.