5. Robot programming
A robot program is a path in the space that to be followed by the manipulator, combined with peripheral actions that support the work cycle. To program a robot, specific commands are entered into the robot's controller memory, and these actions may be performed in a number of ways. Limited sequence robot programming is carried out when limit switches and mechanical stops are set to control the end-points of its motions. A sequencing device controls the occurrence of motions, which in turn controls the movement of the joints that completes the motion cycle.
5.1 Lead-through Programming:
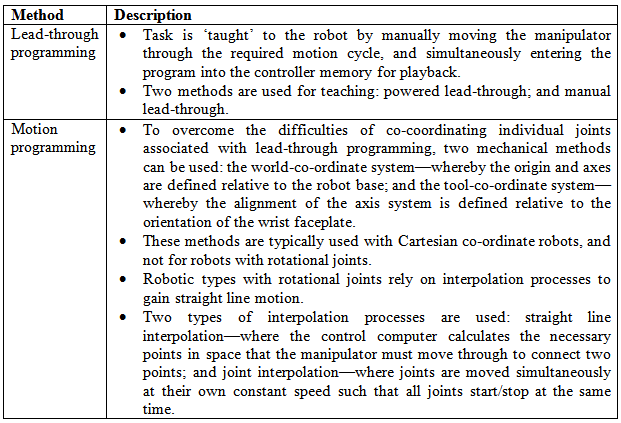
For industrial robots with digital computers as controllers, three programming methods can be distinguished. These are lead-through programming; computer-like robot programming languages; and off-line programming. Lead-through methodologies, and associated programming methods, are outlined in Table 7.6.6.
Table 7.6.6 Lead-through programming methods for industrial robots
5.2 Computer-like Programming
These are computer-like languages which use on-line/off-line methods of programming. The advantages of textual programming over its lead-through counterpart include:
- The use of enhanced sensor capabilities, including the use of analogue and digital inputs
- Improved output capabilities for controlling external equipment
- Extended program logic, beyond lead-through capabilities
- Advanced computation and data processing capabilities
- Communications with other computer systems