4.1 Material Handling Applications
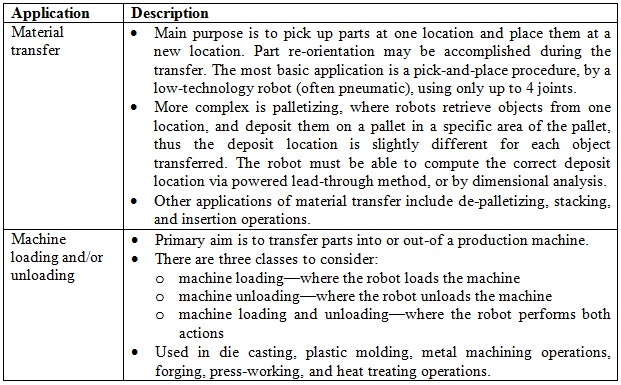
Robots are mainly used in three types of applications: material handling; processing operations; and assembly and inspection. In material handling, robots move parts between various locations by means of a gripper type end effector. Material handling activity can be sub divided into material transfer and machine loading and/or unloading. These are described in Table 7.6.4.
Table 7.6.4: Material handling applications
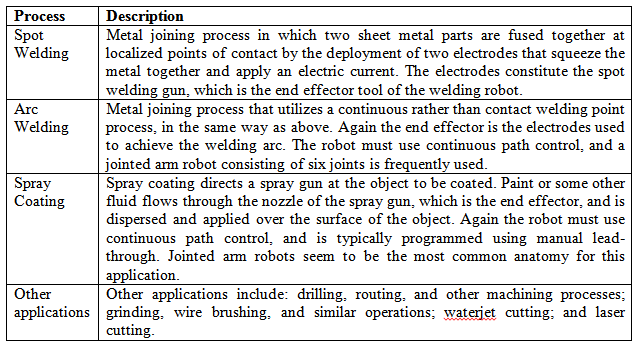
4.2 Processing Operations
In processing operations, the robot performs some processing activities such as grinding, milling, etc. on the workpart. The end effector is equipped with the specialized tool required for the respective process. The tool is moved relative to the surface of the workpart. Table 7.6.5 outlines the examples of various processing operations that deploy robots.
Table 7.6.5: Robotic process operations