3. Sensors in Robotics:
There are generally two categories of sensors used in robotics. These are sensors for internal purposes and for external purposes. Internal sensors are used to monitor and control the various joints of the robot. They form a feedback control loop with the robot controller. Examples of internal sensors include potentiometers and optical encoders, while tachometers of various types are deployed to control the speed of the robot arm.
External sensors are external to the robot itself, and are used when we wish to control the operations of the robot. External sensors are simple devices, such as limit switches that determine whether a part has been positioned properly, or whether a part is ready to be picked up from an unloading bay.
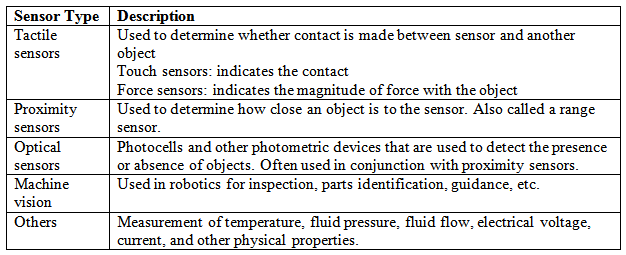
Various sensors used in robotics are outlined in Table 7.6.2.
Table 7.6.2 Sensor technologies for robotics