2. End Effectors
An end effector is usually attached to the robot's wrist, and it allows the robot to accomplish a specific task. This means that end effectors are generally custom-engineered and fabricated for each different operation. There are two general categories of end effectors viz. grippers and tools.
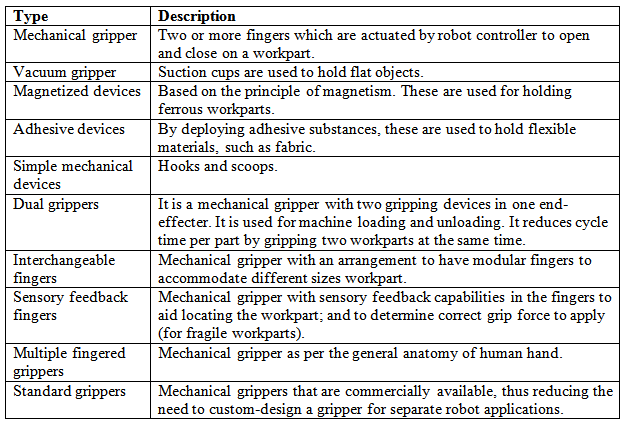
Grippers grasp and manipulate the objects during the work cycle. Typically objects that grasped are the work parts which need to be loaded or unloaded from one station to another. Grippers may be custom-designed to suit the physical specifications of work parts. Various end-effectors, grippers are summarized in Table 7.6.1.
Table 7.6.1 End-Effectors: Grippers
The robot end effecter may also use tools. Tools are used to perform processing operations on the workpart. Typically the robot uses the tool relative to a stationary or slowly-moving object. For example, spot welding, arc welding, and spray painting robots use a tool for processing the respective operation. Tools also can be mounted at robotic manipulator spindle to carry out machining work such as drilling, routing, grinding, etc.