4. Pressure regulation
In pneumatic systems, during high velocity compressed air flow, there is flow-dependent pressure drop between the receiver and load (application). Therefore the pressure in the receiver is always kept higher than the system pressure. At the application site, the pressure is regulated to keep it constant. There are three ways to control the local pressure, these are shown in Figure 6.3.7.
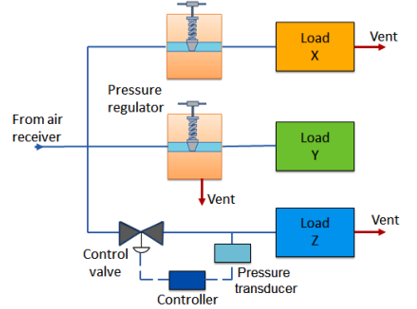
Fig. 6.3.7 Types of pressure regulation
- In the first method, load X vents the air into atmosphere continuously. The pressure regulator restricts the air flow to the load, thus controlling the air pressure. In this type of pressure regulation, some minimum flow is required to operate the regulator. If the load is a dead end type which draws no air, the pressure in the receiver will rise to the manifold pressure. These type of regulators are called as ‘non-relieving regulators’, since the air must pass through the load.
- In the second type, load Y is a dead end load. However the regulator vents the air into atmosphere to reduce the pressure. This type of regulator is called as ‘relieving regulator'.
- The third type of regulator has a very large load Z. Therefore its requirement of air volume is very high and can’t be fulfilled by using a simple regulator. In such cases, a control loop comprising of pressure transducer, controller and vent valve is used. Due to large load the system pressure may rise above its critical value. It is detected by a transducer. Then the signal will be processed by the controller which will direct the valve to be opened to vent out the air. This technique can be also be used when it is difficult to mount the pressure regulating valve close to the point where pressure regulation is needed.