2.3 Differential control
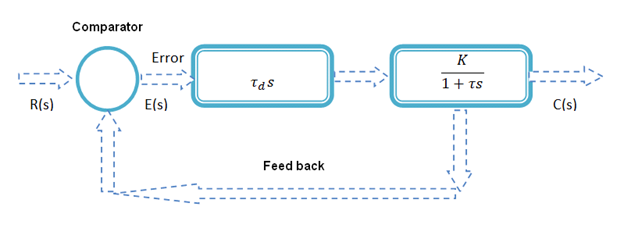
Figure 3.4.7 Block diagram of Differential controller
A derivative controller uses the derivative of the error instead of the integral. Figure 3.4.7 shows the building blocks of a differential controller. In this closed loop system, the transfer function can be written as,
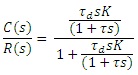 |
(3.4.11.) |
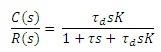 |
(3.4.12.) |
For Step input R(s) = 1/s, the steady state error would be,
| (3.4.13.) |
Effect of adding Differential Controller in system:
Derivative controller improves stability of the system and it also improves settling time. Derivative of the error can be calculated by determining slope of the error over time and multiplying this term with derivative gain τd . Figure 3.4.8 shows the response of a system to unit step Input. It shows an initial jump in the response. This is due to the effect of the derivative controller. Here derivative gain is very high which results in high settling time.
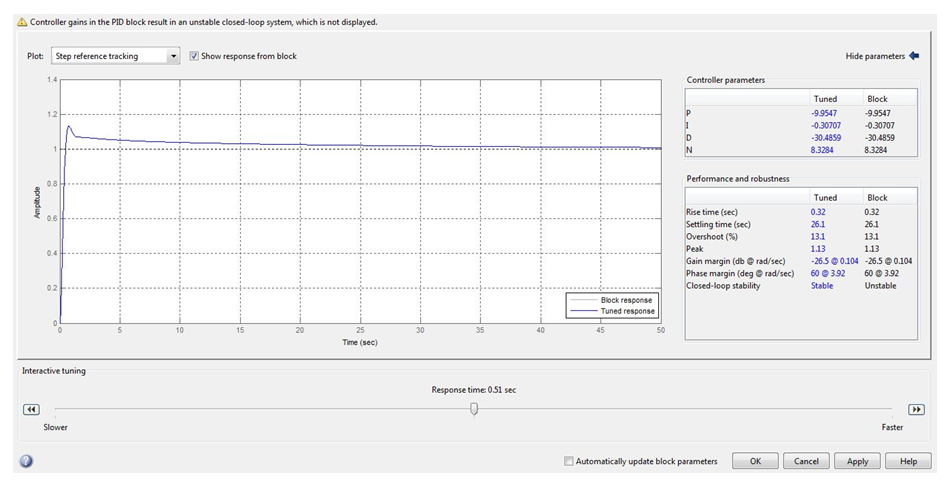 |
Figure 3.4.8 Response using a Differential controller |
After discussing various components of controller following conclusions can be drawn.
- Proportional Controller improves system response time. It provides high proportional gain which results into very low rise time and thus improves the response system.
- Integral Controller makes the system steady with error approaches zero. But Integral controller may increase instability of a system and may cause oscillations. However in Proportional system provides very low value of Integral gain resulting in very low amount of oscillations.
- Derivative controller improves system settling time and also improves stability.
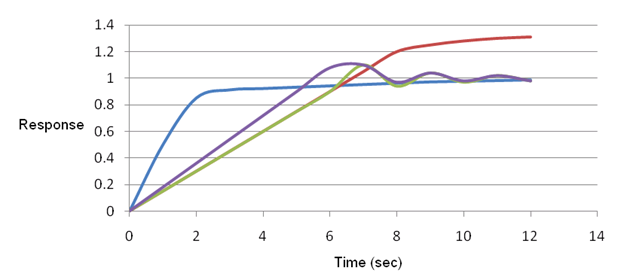
Figure 3.4.9 Comparion of different control systems.
A comparison of systems with no controller, only proportional controller, only Integral controller and both proportional and integral controller can be seen in Figure 3.4.9. It can be seen that the response curve produced by PI controller is better in comparison with that obtained by only P, only I and without any controller. PI controller has the advantages of both the P as well as I controllers. Therefore in general, it is recommended not to employ integral and derivative controllers on their own. They are always to be used in conjunction with a proportional controller.