1. Introduction
In mechatronics, generally the objectives are to automate a process or to control parameters of system. Control systems for manufacturing systems can be categorized into two types. First is the sequential control where all the operations are carried out in a sequence to automate the mechanical system(s). Automated vehicle assembly line is an example of such control system. Such operations are controlled by Programmable Logic Controller (PLCs) which we have already studied in previous lecture.
In the other type of the control system, precise control over output of system is to be obtained. Therefore a continuous monitoring of such system is essential. For example there is a necessity to continuously monitor and control the fuel tank used in a Boiler based power plant. This type of control is also called modulating control. Feedback systems and Proportional-integral-derivative (PID) controllers are employed in these systems.
In general a closed loop system has several input variables and several output variables. However one or two dominant input variables are considered in designing the control system. Output variables are measured by using suitable transducer system and the feedback is sent to the controller for comparison. A block diagram of closed loop system is shown figure 3.4.1.
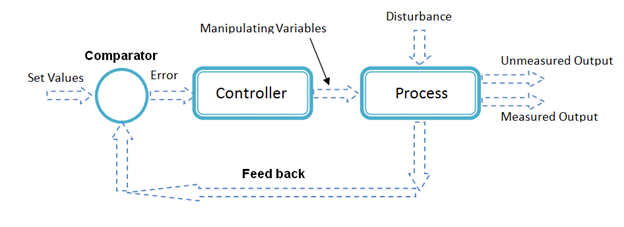
Figure 3.4.1 A closed loop control system
There are various types of closed loop control systems being used in mechatronics. These are listed as follows.
- Single Input Single Output (SISO)
- Multiple Input Single Output (MISO)
- Multiple Input Multiple Output (MIMO)
- Single Input Multiple output (SIMO)