Single and Multi-motor Drives
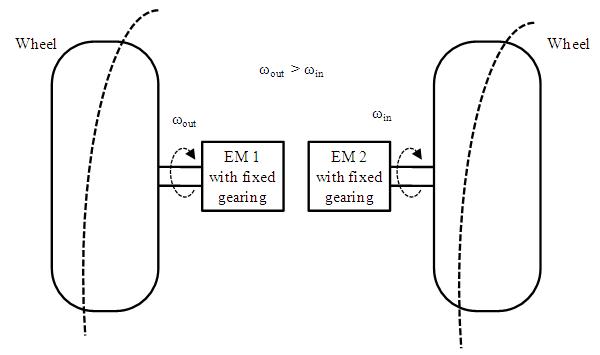
A differential is a standard component for conventional vehicles. When a vehicle is rounding a curved road, the outer wheel needs to travel on a larger radius than the inner wheel. Thus, the differential adjusts the relative speeds of the wheels. If relative speeds of the wheels are not adjusted, then the wheels will slip and result in tire wear, steering difficulties and poor road holding. In case of EVs, it is possible to dispense the mechanical differential by using two or even four EMs. With the use of multiple EMs, each wheel can be coupled to an EM and this will enable independent control of speed of each wheel in such a way that the differential action can be electronically achieved. In Figure 5, a typical dual motor drive with an electronic differential is shown.
|
Figure 5: Differential action |
In Wheel Drives
By placing an electric motor inside the wheel, the in wheel motor has the advantage that the mechanical transmission path between the electric motor and the wheel can be minimized. Two possible configurations for in wheel drives are:
- • When a high-speed inner-rotor motor is used ( Figure 6a ) then a fixed speed-reduction gear becomes necessary to attain a realistic wheel speed. In general, speed reduction is achieved using a planetary gear set. This planetary gear is mounted between the motor shaft and the wheel rim. Usually this motor is designed to operate up to 1000 rpm so as to give high power density.
• In case outer rotor motor is used ( Figure 6b ), then the transmission can be totally removed and the outer rotor acts as the wheel rim and the motor speed is equivalent to the wheel speed and no gears are required.
The tradeoffs of the high-speed inner rotor motor are:
- • It has the advantage of smaller size, lighter weight and lower cost
• Needs additional planetary gearset
The tradeoffs of outer-rotor motor are
- • Low speed and hence does not need additional gears
• The drawbacks are larger size, weight and cost because of the low speed design.