Brake System of EVs and HEVs
The topics covered in this chapter are as follows:
- Brake System of EVs and HEVs
- Series Brake — Optimal Feel
- Series Brake — Optimal Energy Recovery
- Parallel Brake
- Antilock Brake System (ABS)
Brake System of EVs and HEVs
Two basic questions arise while considering regenerative braking in EVs and HEVs:
i. How to distribute the total braking forces required between the regenerative brake and the mechanical friction brake so as to recover the kinetic energy of the vehicle as much as possible.
ii. The other is how to distribute the total braking forces on the front and rear axles so as to achieve a steady-state braking.
Basically, there are three different brake control strategies: series braking with optimal braking feel; series braking with optimal energy recovery; and parallel braking.
Series Brake -- Optimal Feel
The control objective is to minimize the stopping distance and optimize the driver's feel.
Figure 1 illustrates the principle of this braking control strategy. When the commanded deceleration (represented by the braking pedal position) is less than 0.2g , only the regenerative braking on the front wheels is applied, which emulates the engine retarding function in conventional vehicles. When the commanded deceleration is greater than 0.2g , the braking forces on the front and rear wheels follow the ideal braking forces distribution curve I, as shown in Figure 1 by the thick solid line.
The braking force on the front wheels (driven axle) is divided into two parts: regenerative braking force and mechanically frictional braking force. When the braking force demanded is less than the maximum braking force that the electric motor can produce, only electrically regenerative braking will apply. When the commanded braking force is greater than the available regenerative braking force, the electric motor will operate to produce its maximum braking torque, and the remaining braking force is met by the mechanical brake system.
It should be noted that the maximum regenerative braking force produced by an electric motor is closely related to the electric motor's speed. At low speed (lower than its base speed), the maximum torque is constant. However, at high speed (higher than its base speed), the maximum torque decreases hyperbolically with its speed. Therefore, the mechanical brake torque at a given vehicle deceleration varies with vehicle speed.
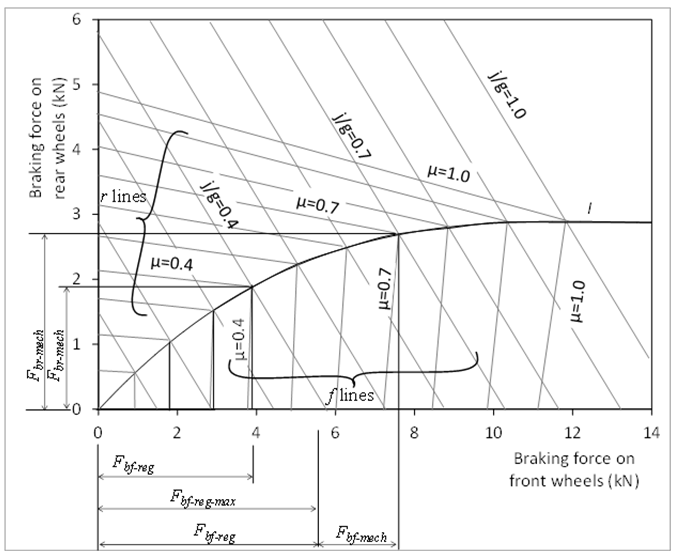
Figure 1: Illustration of braking forces on the front and rear axle for series braking - optimal feel [1]