1. State Estimators or Observers
- • One should note that although state feed back control is very attractive because of precise computation of the gain matrix K, implementation of a state feedback controller is possible only when all state variables are directly measurable with help of some kind of sensors.
• Due to the excess number of required sensors or unavailability of states for measurement, in most of the practical situations this requirement is not met.
• Only a subset of state variables or their combinations may be available for measurements. Sometimes only output y is available for measurement.
• Hence the need for an estimator or observer is obvious which estimates all state variables while observing input and output.
Full Order Observer : If the state observer estimates all the state variables, regardless of whether some are available for direct measurements or not, it is called a full order observer.
Reduced Order Observer : An observer that estimates fewer than ``n'' states of the system is called reduced order observer.
Minimum Order Observer : If the order of the observer is minimum possible then it is called minimum order observer.
2 Full Order Observers
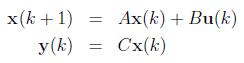
Consider the following system
where ![]() ,
, ![]() and
and ![]() .
.
Assumption : The pair (A,C) is observable.
Goal : To construct a dynamic system that will estimate the state vector based on the information of the plant input u and output y.
2.1 Open Loop Estimator
The schematic of an open loop estimator is shown in Figure 1.
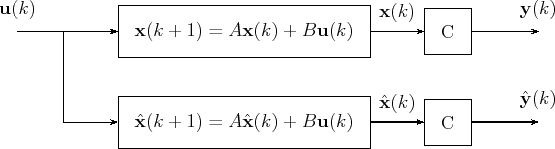 |
The dynamics of this estimator are described by the following
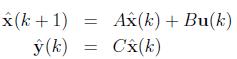
where ![]() is the estimate of x and
is the estimate of x and ![]() is the estimate of y
is the estimate of y