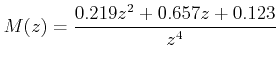
The solutions of the above are m1 = 0.219 , a1 = 1, a2 = 0.781 and a3 = 0.123 . The closed loop transfer function is
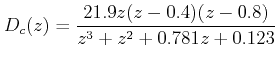
The transfer function of the digital controller is obtained as
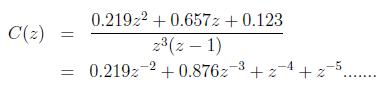
The output for a unit step input is written as
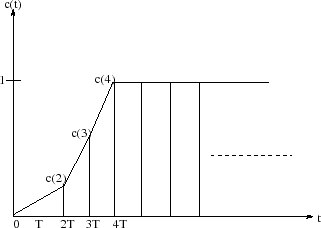
Thus the output response c(kT) reaches the steady state in 4 sampling instants. This is one more sampling instant than the previous example where we considered the plant to be all digital.
This implies that for sampled data control system, the dead beat response c(t) reaches the steady state after three sampling periods but inter sample ripples occur. After four sampling instants the inter sample ripples disappear.
To show that the output response is indeed deadbeat, we derive the z-transform of w(t) which will come out to be ![]() where A1, A2 are constants.
where A1, A2 are constants.
Thus the derivative of c(t) is zero for ![]() , which implies that the step response reaches the steady state in 4 sampling instants with no inter sample ripples, as shown in Figure 4.
, which implies that the step response reaches the steady state in 4 sampling instants with no inter sample ripples, as shown in Figure 4.