To show that the output response is indeed deadbeat, we derive the z-transform of w(t) as ![]()
Thus c(t) will actually reach its steady state in two sampling periods with no inter sample ripples which is shown in Figure 3.
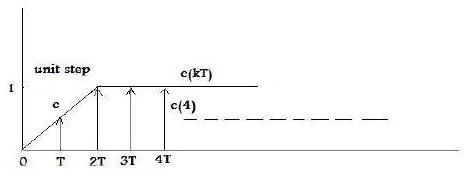
Figure 3: Ripple free deadbeat response for Example 1
Example 2: Consider the plant transfer function as

If we apply the condition that zeros of ![]() at z = - 0.2 and z = - 2.8 should not be canceled by Dc(z) , then
at z = - 0.2 and z = - 2.8 should not be canceled by Dc(z) , then
![]()
![]()
While considering M(z) and 1- M(z), following points should be kept in mind
- 1. M(z) should contain all the zeros of
 .
.
2. The number of poles over zeros of M(z) should be at least equal to that of ![]() which is 2 in this case.
which is 2 in this case.
3. 1- M(z) must include the term 1- z -1.
4. The orders of M(z) and 1- M(z) should be same and should equal the number of unknown coefficients.
Solving for the coefficients of M(z) and 1- M(z) , we get
