1 Sampled data control system with Dead beat response
In case of a continuous time controlled process, the output c(t) is a function of time t and the dead beat response design, based on cancellation of stable poles and zeros, may lead to inter sampling ripples in the output.
The reason behind this is since the process zeros are canceled by controller poles, the continuous dynamics are excited by the input and are not affected by feed back.
The strategy of designing dead beat response for a sampled data system with the process plant transfer function ![]() having at least one zero is not to cancel the zeros, whether they are inside or outside the unit circle.
having at least one zero is not to cancel the zeros, whether they are inside or outside the unit circle.
H.P Sirisena gave a mathematical formulation and analysis to dead beat response.
If  , then according to Sirisena the digital controller for ripple free dead beat response to step input is
, then according to Sirisena the digital controller for ripple free dead beat response to step input is
The design of ripple free dead beat response can still be done using similar approach as discussed in the previous chapters except for an added constraint which will increase the response time of the system.
Following example will illustrate the design procedure
Example 1:
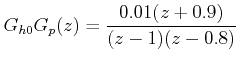
Let us consider a sampled data system as shown in Figure 1, where,
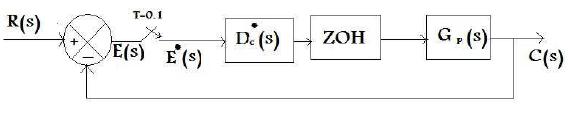
Figure 1: A sampled data control system
Thus
If we design Dc(z) without bothering about the inter sample ripples then
![]()