This implies that the output response is deadbeat only at sampling instants. However, the true output c(t) has inter sampling ripples which makes the system response as shown in Figure 2.
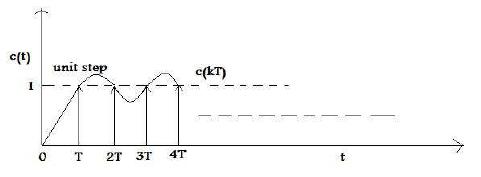
Figure 2: Rippled output response for Example 1
Thus the system takes forever to reach its steady state. The necessary and sufficient condition for c(t) to track a unit step input in finite time is

for finite N and all the higher derivatives should equal to zero. Let
Taking z -transform,
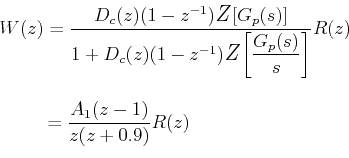
where A1 is a constant. Unit step response of W(z) will not go to zero in finite time since poles of  are not all at z = 0.
are not all at z = 0.
If we now apply the condition that zero of ![]() at z = - 0.9 should not be canceled by Dc(z) , then
at z = - 0.9 should not be canceled by Dc(z) , then
![]()
![]()
Solving
![]()
Thus
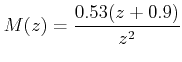
![]()
where A2 and A3 are constants. This implies that the dead beat response reaches the steady state after two sampling periods.