Now let us denote the angle traversed by the phasor drawn from (-1, j0) point to the Nyquist plot of GH(z) as ω varies from ![]() to 0 , on the unit circle of z1 excluding the small indentations, by
to 0 , on the unit circle of z1 excluding the small indentations, by ![]() .
.
It can be shown that
| (1) |
For the closed loop digital control system to be stable, Z-1 should be equal to zero. Thus the Nyquist criterion for stability of the closed loop digital control systems is
| (2) |
Hence, we can conclude that for the closed loop digital control system to be stable, the angle, traversed by the phasor drawn to the GH(z) plot from (-1, j0) point as ω varies from ![]() to 0 , must satisfy equation (2).
to 0 , must satisfy equation (2).
Example 1: Consider a digital control system for which the loop transfer function is given as
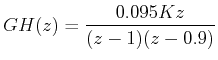
where K is a gain parameter. The sampling time T = 0.1 sec.
Since GH(z) has one pole on the unit circle and does not have any pole outside the unit circle, P-1 = 0 and P0 = 1
Nyquist path has a small indentation at z =1 on the unit circle. The Nyquist plot is shown in Figure 3.
 |
Figure 3: Nyquist plot for Example 1