1.2.3 Type-2 system and acceleration error constant
Systems having a finite nonzero steady state error with a second order polynomial input (parabolic input) are called Type-2 systems. The acceleration error constant for a system is defined for a parabolic input.

where
 is known as the acceleration error constant.
is known as the acceleration error constant.
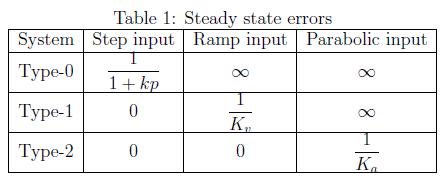
Table1 shows the steady state errors for different types of systems for different inputs.
Example 1: Calculate the steady state errors for unit step, unit ramp and unit parabolic inputs for the system shown in Figure 4.
 |