1.2.1 Type-0 system and position error constant
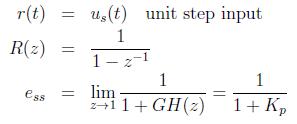
Systems having a finite nonzero steady state error with a zero order polynomial input (step input) are called Type-0 systems. The position error constant for a system is defined for a step input.
where
![]() is known as the position error constant.
is known as the position error constant.
1.2.2 Type-1 system and velocity error constant
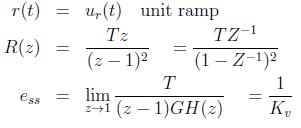
Systems having a finite nonzero steady state error with a first order polynomial input (ramp input) are called Type-1 systems. The velocity error constant for a system is defined for a ramp input.
where
![$ \displaystyle K_v=\frac{1}{T}\lim_{z\rightarrow
1}\left[(z-1)GH(z)\right]$](images/img39.png) is known as the velocity error constant.
is known as the velocity error constant.