1.2 Steady state error
The steady state performance of a stable control system is measured by the steady error due to step, ramp or parabolic input depending on the system type. Consider the discrete time system as shown in Figure 3.
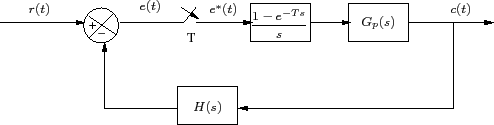 |
From Figure 2, we can write
![]()
We will consider the steady state error at the sampling instants.
From final value theorem
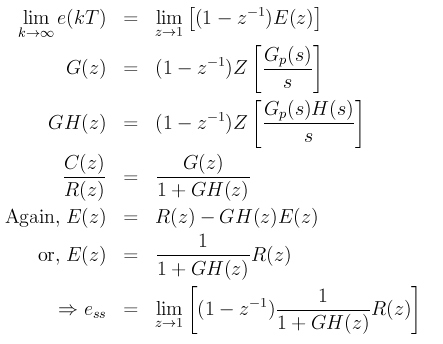
The steady state error of a system with feedback thus depends on the input signal
![]() and the loop transfer function
and the loop transfer function ![]() .
.