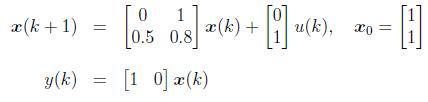
Example 1: Consider the following linear system
Design an optimal controller to minimize the following performance index.
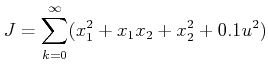
Also, find the optimal cost.
Solution: The performance index J can be rewritten as
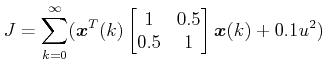
Thus,  and R = 0.1.
and R = 0.1.
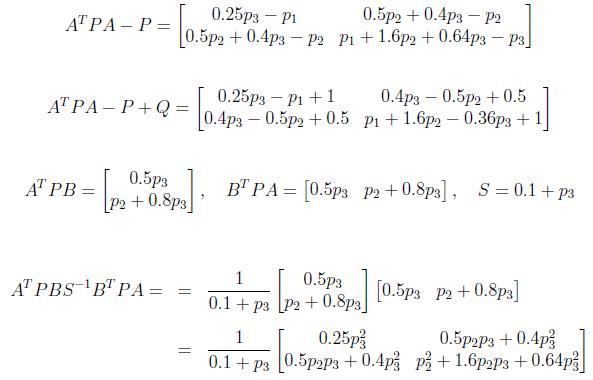
Let us take P as
Then,