Taking derivative of the above function with respect to u(k),
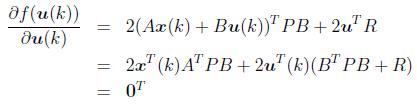
The matrix ![]() is positive definite since R is positive definite, thus it is invertible. Hence,
is positive definite since R is positive definite, thus it is invertible. Hence,
![]()
where ![]() . Let us denote
. Let us denote ![]() by S. Thus
by S. Thus
![]()
We will now check whether or not u* satisfies the second order sufficient condition for minimization. Since

u* satisfies the second order sufficient condition to minimize f.
The optimal controller can thus be constructed if an appropriate Lyapunov matrix P is found. For that let us first find the closed loop system after introduction of the optimal controller.
![]()
Since the controller satisfies the hypothesis of the theorem, discussed in the previous lecture,
![]()
Putting the expression of u* in the above equation,
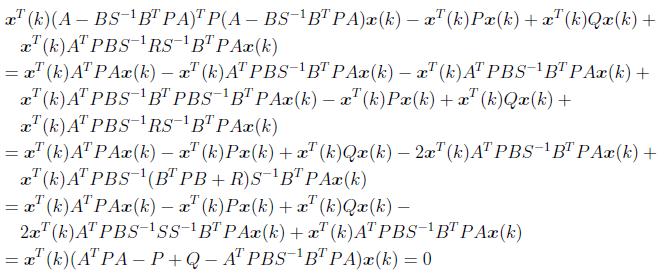
The above equation should hold for any value of x(k). Thus
![]()
which is the well known discrete Algebraic Riccati Equation (ARE). By solving this equation we can get P to form the optimal regulator to minimize a given quadratic performance index.