|
Weaving is defined as the crossing of two or more traffic streams travelling in
the same general direction along a significant length of highway without the aid
of traffic control devices (with the exception of guide signs).
Weaving segments are formed when a merge area is closely followed by a diverge
area, or when an on-ramp is closely followed by an off-ramp and the two are
joined by an auxiliary lane.
Weaving segments require intense lane-changing maneuvers as drivers must access
lanes appropriate to their desired exit points.
Thus, traffic in a weaving segment is subject to turbulence in excess of that
normally present on basic freeway segments.
The turbulence presents special operational problems and design requirements.
Fig. 1 shows the simple weaving segment formed by a
single merge point followed by a single diverge point.
Multiple weaving segments may be formed where one merge is followed by two
diverge points or where two merge points are followed by one diverge point.
Figure 1:
Simple weaving segment
 |
The most critical aspect of operations within a weaving segment is lane
changing.
Weaving vehicles, which must cross a roadway to enter on the right and leave on
the left, or vice versa, accomplish these maneuvers by making the appropriate
lane changes.
The configuration of the weaving segment (i.e., the relative placement of entry
and exit lanes) has a major effect on the number of lane changes required of
weaving vehicles to successfully complete their maneuver.
There is also a distinction between lane changes that must be made to weave
successfully and additional lane changes that are discretionary (i.e., are not
necessary to complete the weaving maneuver).
The former must take place within the confined length of the weaving segment,
whereas the latter are not restricted to the weaving segment itself.
There are three major categories of weaving configurations: Type A, Type B, and
Type C.
The identifying characteristic of a Type A weaving segment is that all weaving
vehicles must make one lane change to complete their maneuver successfully.
All of these lane changes occur across a lane line that connects from the
entrance gore area directly to the exit gore area.
Such a line is referred to as a crown line.
Type A weaving segments are the only such segments to have a crown line.
The most common form of Type A weaving segment is shown in
Fig. 2.
The segment is formed by a one-lane on-ramp followed by a one-lane off-ramp,
with the two connected by a continuous auxiliary lane.
The lane line between the auxiliary lane and the right-hand freeway lane is the
crown line for the weaving segment.
All on-ramp vehicles entering the freeway must make a lane change from the
auxiliary lane to the shoulder lane of the freeway.
All freeway vehicles exiting at the off-ramp must make a lane change from the
shoulder lane of the freeway to the auxiliary lane.
This type of configuration is also referred to as a ramp-weave.
Figure 2:
Ramp Weave
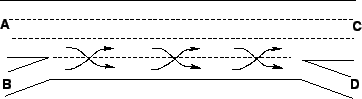 |
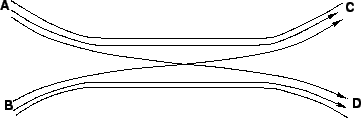
Fig. 3 illustrates a major weaving segment that also has a
crown line.
A major weaving segment is formed when three or four of the entry and exit legs
have multiple lanes.
As in the case of a ramp-weave, all weaving vehicles, regardless of the
direction of the weave, must execute one lane change across the crown line of
the segment.
Figure 3:
Major Weave
 |
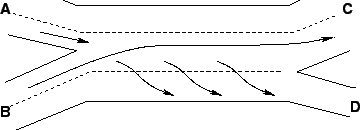
Type B weaving segments are shown in Figs. 4 to
6.
All Type B weaving segments fall into the general category of major weaving
segments in that such segments always have at least three entry and exit legs
with multiple lanes (except for some collector distributor configurations).
It is the lane changing required of weaving vehicles that characterizes for the
Type B configuration:
- One weaving movement can be made without making any lane changes, and
- The other weaving movement requires at most one lane change.
Figs. 4 to 6 show two Type B weaving segments.
In both cases, Lane balance defined Movement B-C (entry on the right, departure on the left) may be made without executing any lane changes, whereas Movement A-D (entry on the left, departure on the right) requires only one lane change.
Essentially, there is a continuous lane that allows for entry on the right and departure on the left.
In Fig. 4 this is accomplished by providing a diverging lane at the exit gore.
From this lane, a vehicle may proceed down either exit leg without executing a lane change.
This type of design is also referred to as lane balanced, that is, the number of lanes leaving the diverge is one more than the number of lanes approaching it.
Figure 4:
Major Weave with Lane Balance at Exit Gore
 |
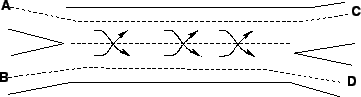
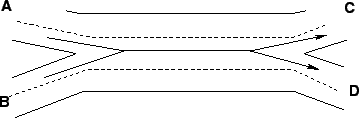
In Fig. 5 the same lane-changing scenario is provided by having a lane from Leg A merge with a lane from Leg B at the entrance gore.
This is slightly less efficient than providing lane balance at the exit gore but produces similar numbers of lane changes by weaving vehicles.
Figure 5:
Major Weave with Merge at Entry Gore
 |
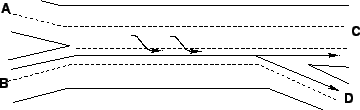
The configuration shown in Fig. 6 is unique, having both a merge of two lanes at the entrance gore and lane balance at the exit gore.
In this case, both weaving movements can take place without making a lane change.
Such configurations are most often found on collector-distributor roadways as part of an interchange.
Figure 6:
Major Weave with Merge at Entry Gore and Lane Balance at Exit Gore
 |
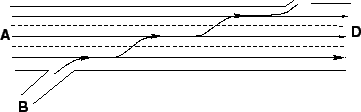
Type C weaving segments are similar to those of Type B in that one or more through lanes are provided for one of the weaving movements.
The distinguishing characteristic of a Type C weaving segment is that the other weaving movement requires a minimum of two lane changes for successful completion of a weaving maneuver.
Thus, a Type C weaving segment is characterized by the following:
- One weaving movement may be made without making a lane change, and
- The other weaving movement requires two or more lane changes.
Figs. 7 to 8 shows two types of Type C weaving segments.
In Fig. 7 Movement B-C does not require a lane change, whereas Movement A-D requires two lane changes.
This type of segment is formed when there is neither merging of lanes at the entrance gore nor lane balance at the exit gore, and no crown line exists.
Although such a segment is relatively efficient for weaving movements in the direction of the freeway flow, it cannot efficiently handle large weaving flows in the other direction.
Figure 7:
Major Weave without Lane Balance or Merging
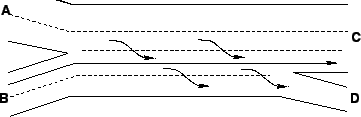 |
Fig. 8 shows a two-sided weaving segment.
It is formed when a right-hand on-ramp is followed by a left-hand off-ramp, or vice versa.
In such cases, the through freeway flow operates functionally as a weaving flow.
Ramp-to-ramp vehicles must cross all lanes of the freeway to execute their desired maneuver.
Freeway lanes are, in effect, through weaving lanes, and ramp-to-ramp vehicles must make multiple lane changes as they cross from one side of the freeway to the other.
Figure 8:
Two-Sided Weave
 |
The configuration of the weaving segment has a marked effect on operations because of its influence on lane-changing behavior.
A weaving segment with 1,000 veh/h weaving across 1,000 veh/h in the other direction requires at least 2,000 lane changes per hour in a Type A segment, since each vehicle makes one lane change.
In a Type B segment, only one movement must change lanes, reducing the number of required lane changes per hour to 1,000.
In a Type C segment, one weaving flow would not have to change lanes, while the other would have to make at least two lane changes, for a total of 2,000 lane changes per hour.
Configuration has a further effect on the proportional use of lanes by weaving and lanes non weaving vehicles.
Since weaving vehicles must occupy specific lanes to efficiently complete their maneuvers, the configuration can limit the ability of weaving vehicles to use outer lanes of the segment.
This effect is most pronounced for Type A segments, because weaving vehicles must primarily occupy the two lanes adjacent to the crown line.
It is least severe for Type B segments, since these segments require the fewest lane changes for weaving vehicles, thus allowing more flexibility in lane use.
|
|