The frequency at which a sinusoidal oscillator will operate is the frequency for which the total phase shift introduced, as the signal proceeds form the input terminals, through the amplifier and feed back network and back again to the input is precisely zero or an integral multiple of 2p. Thus the frequency of oscillation is determined by the condition that the loop phase shift is zero.
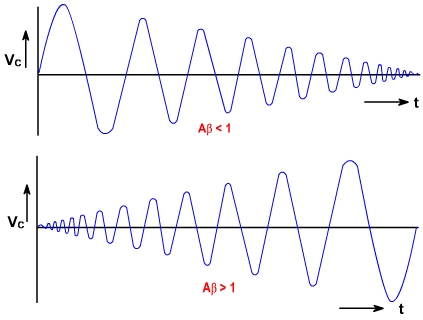
Oscillation will not be sustained, if at the oscillator frequency, A β <1 or A β>1. Fig. 5, show the output for two different contions A β < 1 and A β >1.
Fig. 5
If Aβ is less than unity then Aβ vin is less than vin, and the output signal will die out, when the externally applied source is removed. If Aβ>1 then A b vinis greater than vin and the output voltage builds up gradually. If A β = 1, only then output voltage is sine wave under steady state conditions.
In a practical oscillator, it is not necessary to supply a signal to start the oscillations. Instead, oscillations are self-starting and begin as soon as power is applied. This is possible because of electrical noise present in all passive components.
Therefore, as soon as the power is applied, there is already some energy in the circuit at fo, the frequency for which the circuit is designed to oscillate. This energy is very small and is mixed with all the other frequency components also present, but it is there. Only at this frequency the loop gain is slightly greater than unity and the loop phase shift is zero. At all other frequency the Barkhausen criterion is not satisfied. The magnitude of the frequency component fo is made slightly higher each time it goes around the loop. Soon the fo component is much larger than all other components and ultimately its amplitude is limited by the circuits own non-lineareties (reduction of gain at high current levels, saturation or cut off). Thus the loop gain reduces to unity and steady stage is reached. If it does not, then the clipping may occur.
Practically, Aβ is made slightly greater than unity. So that due to disturbance the output does not change but if Aβ = 1 and due to some reasons if Aβ decreases slightly than the oscillation may die out and oscillator stop functioning. In conclusion, all practical oscillations involve:
- An active device to supply loop gain or negative resistance.
- A frequency selective network to determine the frequency of oscillation.
- Some type of non-linearity to limit amplitude of oscillations.
Example - 1
The gain of certain amplifier as a function of frequency is A (jω) = -16 x 106 / jω. A feedback path connected around it has β(j ω ) = 103 / (20 x 103 + jω )2. Will the system oscillate? If so, at what frequency ?
Solution:
The loop gain is
To determine, if the system will oscillate, we will first determine the frequency, if any, at which the phase angle of
equals to 0° or a multiple of 360°. Using phasor algebra, we have
This expression will equal -360° if
,
Thus, the phase shift around the loop is -360° at ω = 2000 rad/s. We must now check to see if the gain magnitude |A β| = 1 at ω = 2 x 103. The gain magnitude is
Substituting ω = 2 x 103, we find
Thus, the Barkhausen criterion is satisfied at ω = 2 x 103 rad/s and oscillation occurs at that frequency (2 x 103 / 2 π= 318 .3 Hz).