Example:
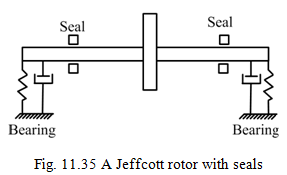
11.12 Instability due to Seals
Equations of motion of a Jeffcott rotor with seals as shown in Figure 11.35 can be written as

where x and y are linear displacements of rotor in two orthogonal directions, m is the mass of the rotor, c /2 is the damping of each bearing, and k /2 is the stiffness of each bearing. Subscripted c /2 and k /2 are damping and stiffness of each seal with sd and sc subscripts represent, respectively, the direct and cross-coupled terms. On defining a complex displacement ![]() , equations of motion can be written as
, equations of motion can be written as

The condition of stability can be obtained as follows. Assuming the solution of the form
![]()
On substituting in equation of motion, we get
![]()
From stability conditions (equation (11.206)), we have


or
Conditions (11.217) and (11.221) are too complicated to be analysed in its general from. It will be advisable to consider as special case by considering few parameters at a time. For example, for ![]() , equations of motion and condition of stability reduces to the case of the steam whirl.
, equations of motion and condition of stability reduces to the case of the steam whirl.
Example:
11.13 Non-linear Equations of Motion of the Jeffcott Rotor (Run-up and run-down)
In a real case quite often it is required to accelerate the rotor from the rest to its operating speed with certain angular acceleration. It is required, while run-up (or start-up), to cross critical speeds or instability regions quickly, so that the time taken in traversing these critical speed or instability regions are short to avoid possible built up of the large oscillations. In the following example the equations of motion of the Jeffcott rotor will be derived and analysed for a variable speed of the rotor.


Solution : (i) Equations of motion of the Jeffcott rotor in the x , y , and q directions can be written as

and
![]()
On simplification of above equations, we get

It should be noted that, for a known torque, equations (d) to (f) have to be solved simultaneously to get the resultant angular acceleration of the rotor. However, for required angular acceleration, equations (d) and (e) are uncoupled and can be solved for x and y, which can be used in equation (f) to get the torque required to produce the desired angular acceleration.
(ii) For perfectly balance rotor, i.e., eccentricity e = 0 and for a constant torque Tc, from equation (f), we have

which can be written as
