Derivation of the equation of motion of continuous system using d'Alembert's principle .
In this lecture, with help of example we will derive the governing equation of motion of a continuous or distributed mass system using d'Alembert's principle. It may be noted that in previous two lectures we considered discrete system in which the governing equation of motions are in the form of ordinary differential equations. But in continuous system the governing equations are in the form of partial differential equation as the state vector (e.g., displacement) depends not only on time but also on the space co-ordinates. For example in case of axial vibration of a bar the axial displacement of the bar depends on the time and location of the point on the bar at which the displacement has to be measured. Also, it may be noted that, unlike discrete system where the natural frequencies of the system has a definite value, in case of continuous system the system has infinite number of natural frequencies. Depending on particular applications, one may convert the analysis of continuous system to that of a multi-degree of freedom system by considering finite participating modes in the analysis.
Example 2.3.1: Figure 2.3.1 shows a roller-supported base excited cantilever beam with tip mass. In practical application it can be a single-link flexible Cartesian manipulator with a payload of mass M. The left end of the manipulator is roller-supported which is subjected to harmonically varying support motion ![]() . The right end of the manipulator is subjected to a sinusoidally varying axial force
. The right end of the manipulator is subjected to a sinusoidally varying axial force ![]() . The motion of the manipulator is considered to be in the vertical plane. Derive the governing equation of motion using d'Alembert's principle.
. The motion of the manipulator is considered to be in the vertical plane. Derive the governing equation of motion using d'Alembert's principle.
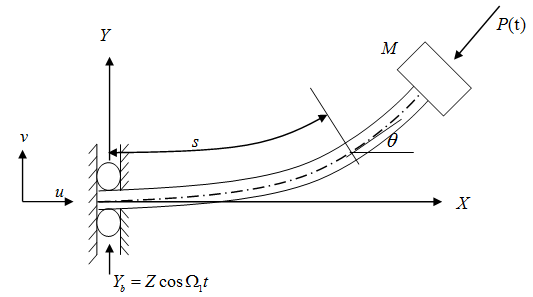
Figure 2.3.1 Schematic diagram of a single-link Cartesian manipulator with payload subjected to harmonically varying axial force.