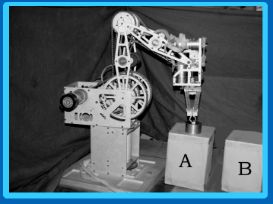
The robot is required to pick objects from point A and place them at point B. The specific path taken by the end-effector is not of much concern except that it should avoid collision with other objects in the environment. Consider another typical task such as welding depicted in Fig. 12.2.2, wherein the end-effector is required to strictly trace the desired path to ensure a proper weld. |