One generalization is that the main body of the robot is used to position an object (or tool) while the wrist is used to orient it. Grippers are used to grasp objects.
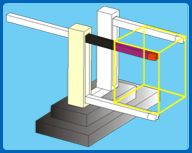
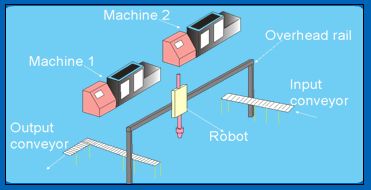
Figure 3.2.1
Cartesian Robot (see figure 3.2.1). On several shop floors Gantry type of Cartesian robots (consisting of overhead rails) are used for operations over large spaces.
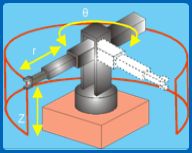
Figure 3.2.2
Cylindrical main body. PPR (See figure 3.2.2). Such motions are found typically in drilling machines. A similar main body is used in robots to access points in a cylindrical volume. (Essentially R- q motion in a plane which in turn translates along the Z axis.)
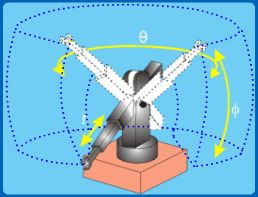
Figure 3.2.3 -Spherical Main Body
Spherical main body (RRP - Figure 3.2.3) There is a base rotation and a portion of the arm moves in and out (a telescopic motion). The work volume is a portion of a hollow sphere. (Essentially R- q - f motions)