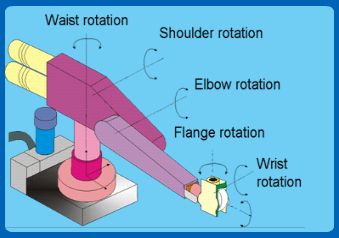
Figure 3.1.1 shows PUMA robot (the manipulator). A total of 6 variables are required, for specifying the position and orientation of a rigid body in space. Therefore PUMA has 6 axis of rotation with 1 DOF (degree of freedom) per axis.
The functioning of this robot is like a human arm. Each DOF has an actuator for motion. |