CRANK
Crank undergoes pure rotary motion and let us assume that it is rotating at a constant speed  . Let G be the center of mass of the crank as shown in Fig 3.3 and so we can write: . Let G be the center of mass of the crank as shown in Fig 3.3 and so we can write:
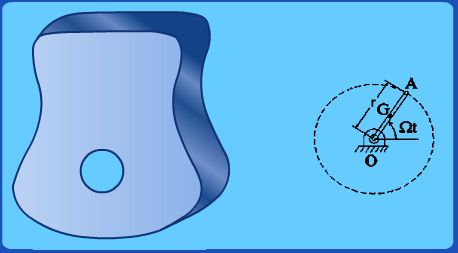
Figure 3. 3 Typical Crank
Centripetal acceleration = (OG)  (3.8) (3.8)
The inertial force (radial) due to crank rotation is given by:
Inertia force =  (OG) (OG)  (3.9) (3.9)
where mc is the mass of the crank
This inertia force can be balanced out by the techniques learnt in the previous module and we could make sure that G coincides with O. Then the inertia force would be reduced ideally to zero. If need be, we could always use the above formula to estimate the inertia forces due to crank.
For reasons that will become clear when we discuss the dynamics of connecting rod, it is common to assume that the entire mass of the crank is actually concentrated at the pin A. Thus we can write,
Effective crank mass at A =  (OG)/(OA) (3.10) (OG)/(OA) (3.10) |