Pole zero map of the uncompensated system is shown in Figure 3. Sum of angle contributions at the desired pole is ![]() , where
, where ![]() is the angle by the zero,
is the angle by the zero, ![]() , and
, and ![]() and
and ![]() are the angles contributed by the two poles, 0.82 and 1 respectively.
are the angles contributed by the two poles, 0.82 and 1 respectively.
From the pole zero map as shown in Figure 3, the angles can be calculated as ![]() ,
, ![]() and
and ![]() .
.
Net angle contribution is ![]() . But from angle criterion a point will lie on root locus if the total angle contribution at that point is
. But from angle criterion a point will lie on root locus if the total angle contribution at that point is ![]() . Angle deficiency is
. Angle deficiency is ![]()
Controller pulse transfer function must provide an angle of 66.5°. Thus we need a Lead Compensator. Let us consider the following compensator.
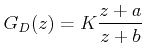 |
If we place controller zero at z = 0.82 to cancel the pole there, we can avoid some of the calculations involved in the design. Then the controller pole should provide an angle of ![]() .
.
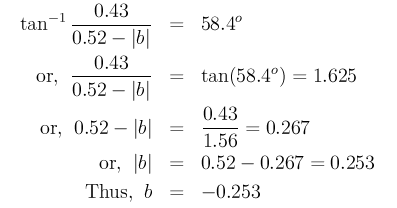
Once we know the required angle contribution of the controller pole, we can easily calculate the pole location as follows.
The pole location is already assumed at ![]() . Since the required angle is greater than
. Since the required angle is greater than ![]() we can easily say that the pole must lie on the right half of the unit circle. Thus b should be negative. To satisfy angle criterion,
we can easily say that the pole must lie on the right half of the unit circle. Thus b should be negative. To satisfy angle criterion,
The controller is then written as 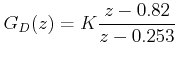 . The root locus of the compensated system (with controller) is shown in Figure 4.
. The root locus of the compensated system (with controller) is shown in Figure 4.
![\includegraphics[width=12cm]{m5l2rl2.eps}](images/img74.png) |
Figure 4: Root locus of the compensated system