Since  , we get approximately 9 samples per cycle of the damped oscillation.
, we get approximately 9 samples per cycle of the damped oscillation.
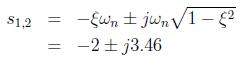
The closed loop poles in s-plane
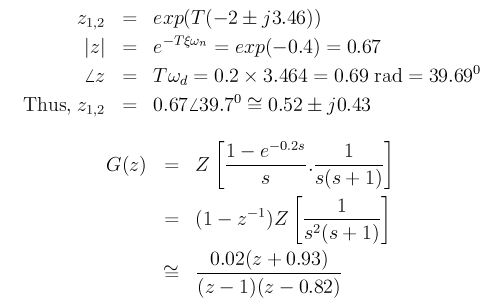
Thus the closed loop poles in z-plane
![\includegraphics[width=12cm]{m5l2rl1.eps}](images/img41.png) |
Figure 2: Root locus of uncompensated system
The root locus of the uncompensated system (without controller) is shown in Figure 2. It is clear from the root locus plot that the uncompensated system is stable for a very small range of K.
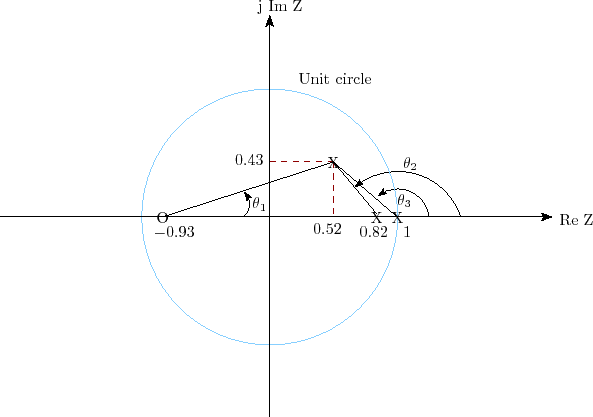 |
Figure 3: Pole zero map to compute angle contributions