An alternative to using a proportional control law is to vary the input E using the following rule:
For an integral controller, in steady state  . If this were not true, E would go on increasing, as a consequence of the above equation (therefore contradicting the statement that the system is in steady state). . If this were not true, E would go on increasing, as a consequence of the above equation (therefore contradicting the statement that the system is in steady state).
Therefore Integral control ensures perfect regulation in steady state. .
| However transient response can be poor with an integral controller. A step change in the reference value of current can lead to oscillatory behaviour. This is depicted for a integral controller for which the reference current is increased from 0 to 1 A at t=1s. The initial current in the circuit is zero and R=1 W, L=0.1 H. It is clear that a very large value of integral controller gain gives an overshoot and oscillatory behaviour |
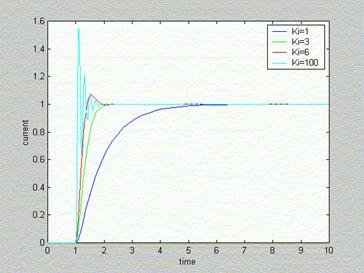
(click to enlarge) |
To obtain good regulation as well as good transient response, one can use a combination of a proportional and an integral controller. The following control law achieves this:
Alternatively, one could also have an additional component of E which varies proportional to the rate of change of current. Such a controller is called a proportional-integral-derivative controller. Note that in practice one may only be able to obtain an approximate derivative (an exact derivative requires future information which is not possible to implement due to causality conditions).
While we have discussed the nature of control laws, we have not really discussed the design of the individual parameters of controllers. The choice of actual values of gains (e.g. K, Ki, Kp), are chosen based on the satisfaction of certain specifications like maximum steady state error, stability, overshoot etc. For a detailed account of design issues, you may refer to any book on basic control systems (see, for example, Nagrath I J & Gopal M: Control System Engineering New age International Publishers).
We now discuss the transfer function representation which is commonly used to represent such systems. |