| |
| | |
|
SCAT (Sydney Co-ordinated Adaptive Traffic Control) System was developed by the
Roads and Traffic Authority (RTA) of New South Wales, Australia in the late
1970s.
It is automated, real time, traffic responsive signal control strategy.
Timing of signals is governed by computer-based control logic.
It has ability to modify signal timings on a cycle-by-cycle basis using traffic
flow information collected at the intersection approach stop lines.
It is not model based but has a library of plans that it selects from and
therefore banks extensively on available traffic data.
The system is very flexible, powerful, expandable, and yields unprecedented
monitoring and management possibilities.
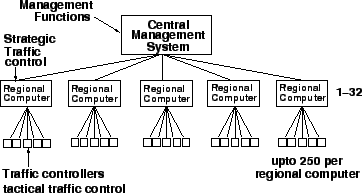
The total system is divided into intersection, regional and a central system
management.
Distribution of the regional computers is determined by the economics of
communication.
Each regional computer maintains autonomous control of its region.
Input data is collected by a system of traffic sensors.
Sensors may be inductive loop detectors embedded in the pavement or video image
devices mounted overhead on the signal strain poles.
The system is designed to auto calibrate itself according to the data received,
to minimize the need for manual calibration and adjustment.
Fig. 1 shows the SCAT Computer Hierarchy.
- Normal Mode- Provide integrated traffic responsive operation
- Fall-Back Mode- Implement the time plans when computer or communication
failure occurs
- Isolated Control Mode- vehicle actuation with isolated control works
- Fourth mode- signal display flashing yellow or red at all approaches
Figure 1:
Shows the SCAT Computer Hierarchy (Source: Lowrie, 1982)
 |
- Travel time and accident reduction, saving in fuel consumption, and
reduces air pollution.
- It replaces the manual collection of data which are required for road
Planning.
- It provides a greater volume of original data with good accuracy level.
- Lacks user-friendly interface features to support day-to-day operations
& programming tasks.
- The error messages are not easy to read & do not provide the opportunity
for corrective actions by system operators.
- It is expensive because it includes advanced technology which is
expensive and to understand and operate this type of technology person should
have very good knowledge.
|
|
| | |
|
|
|