| |
| | |
|
Pulsed and Active Ultrasonic
Ultrasonic sensors transmit pressure waves of sound energy at a frequency
between 25 and 50 KHz.
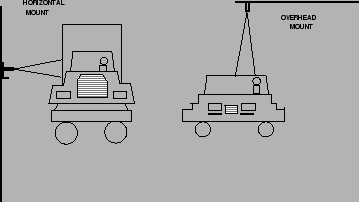
Pulse waveforms measure distances to the road surface and vehicle surface by
detecting the portion of the transmitted energy that is reflected towards the
sensor from an area defined by the transmitter’s beam width.
When a distance other than that to the background road surface is measured, the
sensor interprets that measurement as the presence of a vehicle as shown in
Fig. 1.
The received ultrasonic energy is converted into electrical energy that is
analyzed by signal processing electronics that is either collocated with the
transducer or placed in a roadside controller.
Vehicles flow and vehicular speed can be calculated by recording the time at
which the vehicle crosses each beam.
Advantages
- Highly accurate.
Disadvantages
- Environmental effects affecting sound propagation degrade performance.
- Pulsed units with low sampling rate miscount or misclassify fast moving
vehicles.
Figure 1:
Ultrasonic range-measuring sensors, source
 |
Passive Acoustic Array Sensors
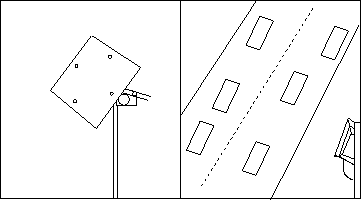
An array of microphones is used to detect the sound of an approaching vehicle
above an ambient threshold level.
Time lags and signal variations between microphone positions are used to
determine vehicle location relative to the array as shown in
Fig. 2.
Further processing of signal yield to speed information and possibly engine type
classification.
It collected flow, speed, occupancy, possibly classification.
Advantages
- Completely passive system
- Direct speed measurement.
Disadvantages
- Environmental effects affecting sound propagation degrade performance
- Low accuracy in busy locations due to interference from adjacent sources.
Figure 2:
Acoustic array sensors, source
 |
|
|
| | |
|
|
|