Introduction
1.1 Lecture 0
The Detection and Estimation theory is a branches of the statistical signal processing that deal with the decision making and the extraction of relevant information from noisy data. In many electronic signal processing systems are designed to decide when an event of interest occurs and then extract more information about that event. Detection and Estimation theory can be found at the core of those systems.
Some typical applications involving the use of the detection and the estimation theory principles include:
- Biomedicine: where the presence of cardiac arrhythmia is to be detected from electrocardiogram or the heart rate of a fetus has to be estimated from sonography during pregnancy in presence of sensor and environmental noises.
- Control Systems: where the position of a powerboat for the corrective navigation system has to be estimated in the presence of sensor and environmental noise or the occurrence of an abrupt change in the system is to be detected.
- Communication Systems: where the transmitted signals have to be identified at the receiver or the carrier frequency of a signal is to be estimated for demodulation of the baseband signal in the presence of degradation noise.
- Image Processing: where an object has to be identified or its position and orientation from a camera image has to be estimated in the presence of lighting and background noises.
- Radar Systems: where the occurrence of an air-bourne target (e.g., an aircraft, a missile) is to be detected or the delay of the received pulse echo is to be estimated to determine the location of the target in the presence of noises.
- Siesmology: where the presence of underground oil is to be detected or the distance of oil deposit has to be estimated from noisy sound reflection due to different densities of oil and rock layers.
- Sonar Systems: where the presence of a submarine is to be detected or the delay of the received signal from each of sensors is to be estimated to locate it in the presence of noises and attenuations.
- Speech Processing: where the presence of different events (such as phonemes or words) is to be detected in speech signal in context of speech recognition application or the parameters of the speech production model have to be estimated in-context of speech coding application in the presence of speech/ speaker variability and the environmental noises.
Apart from these, a number of applications stemming from the analysis of data from physical phenomena, economics, etc., could also be mentioned.
The majority of applications require either detection one or more events of interest and/or the estimation of an unknown parameter from a collection of observation data which also includes “artifacts” due to sensor inaccuracies, additive noise, signal distortion (convolution noise), model inaccuracies, unaccounted source of variability and multiple interfering signals. These artifacts make the dectection and estimation a challenging problems.
1.1.1 Formulation of the Estimation Problem
The model used in estimation problem involves four components.
- The first is the source, whose output depends on a parameter θ that can be regarded as a point in parameter space. The parameter is either random or nonrandom (deterministic), unkown quantity.
- The second component is the probabilistic mapping that governs the effect of the parameter on the observations x. This probability mapping is expressed in terms of the joint probability density function (PDF), denoted by p(x; θ).
- The third component is the observation space which is usually multidimensional measurements belonging to either the continuous or the discrete domain.
- The fourth and the last components is the estimation rule g(x) that determines the mapping of the observation space into an estimate of the unknown parameter.
The whole process is illustrated in Figure 1.1.
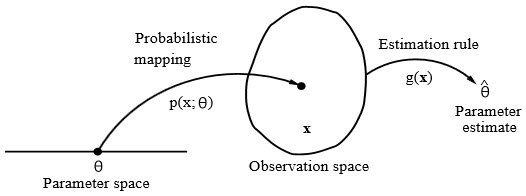
Figure 1.1: Estimation model