Modelling of the Dynamic System: (contd...)
If we assume velocity proportional control algorithm, the active strain becomes proportional to the transverse velocity of the beam  , the symbol ‘.’ denotes differentiation with respect to time, the constant of proportionality C is function of electro/magneto-mechanical constant(d), and controller gain (f). , the symbol ‘.’ denotes differentiation with respect to time, the constant of proportionality C is function of electro/magneto-mechanical constant(d), and controller gain (f).
In the case of magnetostrictive material,  , where the coil constant is given by , where the coil constant is given by
 |
(28.6) |
where, nc is the total number of coil-turns, rc – effective length of magnetizing coil and wc – effective width of magnetizing coil.
Thus, stress at any layer may now be written as
 )] )] |
(28.6) |
Using the Hamilton's principle, the governing equations of motion may be derived as
 ) ) |
(28.7) |
with the following boundary conditions:
i) either  or or 
ii) either  or or 
Initial conditions in time will also be prescribed along with. |
|
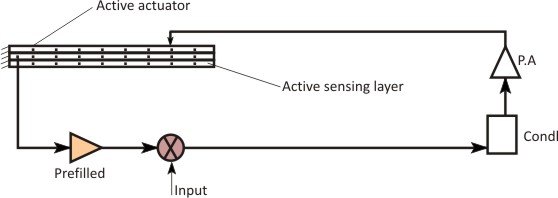
Figure 28.3: Distributed control of a composite beam |