Response of First and Second Order Systems
A first order system is denoted by a system having a first order denominator-polynomial.
The system may be represented in two ways
 in a block-diagram form in a block-diagram form
by showing the poles and zeroes of the transfer function in a plot known as s-plane.
The figures below show the two representations: 
Here, the symbol x' denotes the pole location. R(s) denotes the input signal and C(s) the output or response of the system. The first order system is symbolically represented as G(s); a' is also known as the time constant of the system. It may be noted that for a stable system the poles are always located at the left-half region of σ , jω plane.
The transfer function G(s) for a second order system is denoted as
Here, ωn denotes the frequency of the system and ς the damping ratio. For an under-damped system, the roots of the denominator polynomial would be a pair of complex conjugate points in the s-plane and the corresponding response of such a system to a step input is shown in the figure below.
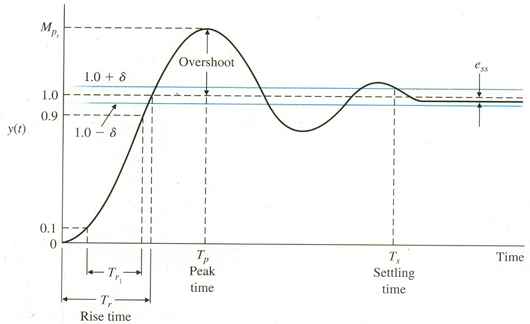
Figure 23.4: Time response of a second order system
There are four major specifications that define the response of a second order system.
The swiftness of the response is measured by the rise time (Tr ), which is defined as the time required reaching 90% of the reference input.
The closeness of the response signal to the reference is measured in terms of % overshoot ( PO ) such that
PO = ((Mp final value)/final value)*100
The time taken to reach the maximum response is denoted by Peak Time (Tp ) . The % overshoot is measured at the same location. Finally, the Settling Time (Ts ) is defined as the time required for the system to settle within a certain percentage of the reference input (±δ ).
For a second order system, the above four specifications could be defined in terms of natural frequency and damping factor of the system as:
 |
(23.8) |
|