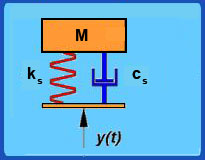
Various elements of a typical vibrating system and the standard configuration for assembly of the vibrating system are shown pictorially in Fig. 6.2.2. The system shown in this figure is what is known as a Single Degree of Freedom system. We use the term degree of freedom to refer to the number of coordinates that are required to specify completely the configuration of the system. Here, if the position of the mass of the system is specified then accordingly the position of the spring and damper are also identified. Thus we need just one coordinate (that of the mass) to specify the system completely and hence it is known as a single degree of freedom system.
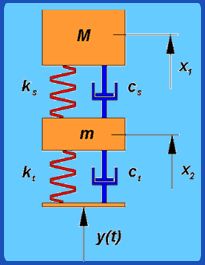
What is shown in Fig. 6.2.3 is a two degree of freedom system. With reference to automobile applications, this is referred as quarter car model. The bottom mass refers to mass of axle, wheel etc components which are below the suspension spring and the top mass refers to the mass of the portion of the car and passenger. Since we need to specify both the top and bottom mass positions to completely specify the system, this becomes a two degree of freedom system.
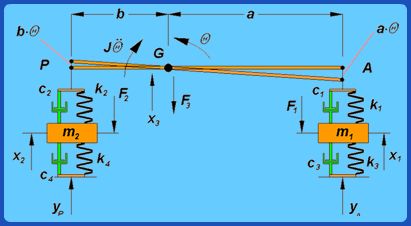
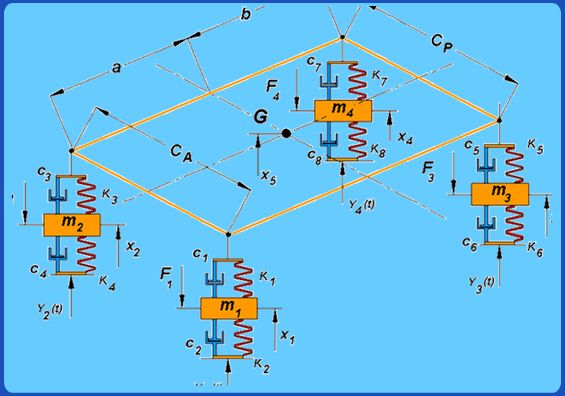
A half-car model shown in Fig. 6.2.4 is a four degree of freedom model where G is the centre of mass. A full car model, on the other hand (Fig. 6.2.5) has several degrees of freedom. |