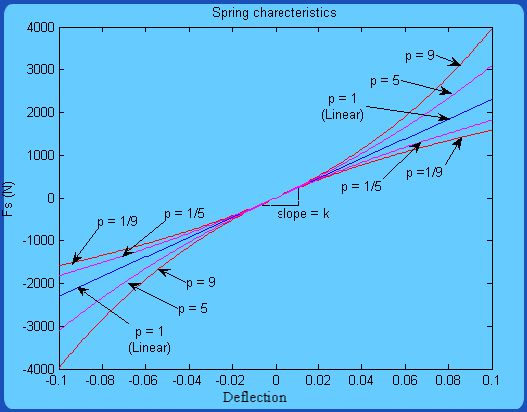
When we refer to modeling a vibrating system, we need to distinguish between two types of models viz., physical models and mathematical models. Physical model of a system is a representation of the physics of the system that we would like to include in our study. For example, we may consider dissipation negligible in a system for a given study and may say that the physical model of the system consists of purely spring-mass systems. Now a mathematical model refers to a mathematical relation that defines the input-output relation of the elements. For example, we could have a simple linear relation between force and deflection for a spring or a more complicated non-linear relation (for example softening or hardening types) as shown in Fig. 6.2.1. For a given problem of engineering, we typically develop first the physical model i.e., decide which physics is important to include in the model and then build the mathematical description of the various elements to develop the mathematical model.
Modeling of mass or inertia of a system seems fairly straight forward, at a first glance. We just need to worry about the total mass/inertia of the system and use it in system models. For example in an automobile, there is a certain mass of the vehicle chassis, body, engine etc and we can include these masses in the model of the system. Of course the vehicle mass changes with the number of passengers and the luggage but that can also be determined and taken into account.
However as we study the issue deeper we realize some difficulties. For example, we want to develop a mathematical model of the vehicle and study its dynamics (to ensure its satisfactory performance) before the vehicle prototype is actually built. How do we ascertain the system mass moment of inertia at this stage? But we need the inertia numbers for accurate modeling of the roll, yaw, pitch etc. How do we precisely locate the centre of gravity of the vehicle that is yet to be built?! Similarly consider the example of sloshing of a fluid inside a tanker being transported from place to place. Due to road undulations and driving characteristics, the liquid is bound to slosh inside the tanker. When we are modeling the dynamics of the vehicle body subjected to road undulation, how do we exactly model the mass of the fluid? Another interesting example arises in the case of marine structures for examples, ships, submarines etc. When a ship hull vibrates, how much mass of the water adjacent to it participates in the vibration?
Thus we see that while for simple cases it is easy to model the mass of a vibrating system, for complex problems, this could become a big issue and demands deeper study. |