1. Relationship between s-plane and z-plane
In the analysis and design of continuous time control systems, the pole-zero configuration of the transfer function in s-plane is often referred. We know that:
. Left half of s-plane
![]() Stable region.
Stable region.
. Right half of s-plane
 Unstable region.
Unstable region.
For relative stability again the left half is divided into regions where the closed loop transfer function poles should preferably be located.
Similarly the poles and zeros of a transfer function in z-domain govern the performance characteristics of a digital system.
One of the properties of F*(s) is that it has an infinite number of poles, located periodically with intervals of
![]() with m = 0, 1, 2,......,
in the s-plane where
with m = 0, 1, 2,......,
in the s-plane where ![]() is the sampling frequency in rad/sec.
is the sampling frequency in rad/sec.
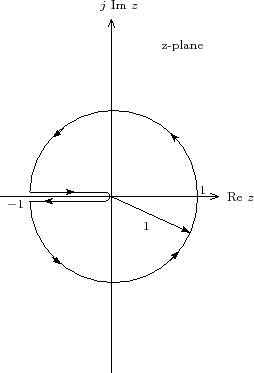
If the primary strip is considered, the path, as shown in Figure 1, will be mapped into a unit circle in the z-plane, centered at the origin.

The mapping is shown in Figure 2.