V.7 Adaptive Control
It is understood in the previous chapters that task of controller design for a process is very much domain specific. First the model of the process is linearized around a certain nominal point and the controller is designed on the basis of that linearized model and finally implemented on the process. Hence, the controller is applicable for certain domain around the nominal operating point around which the model has been linearized. However, if the process deviates from the nominal point of operation, controller will lose its efficiency. In such cases, the parameters of the controller need to be re-tuned in order to retain the efficiency of the controller. When such retuning of controller is done through some “automatic updating scheme”, the controller is termed as adaptive controller. The technique can be illustrated with the following figure.
|
|
|
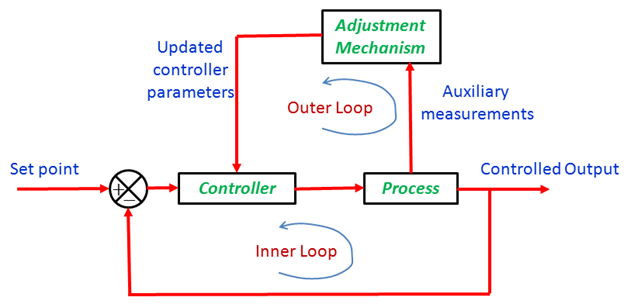
Fig. V.15: Adaptive control |