The uncontrolled responses of the processes are
(IV.24) |
|
(IV.25) |
The controlled responses of the processes are
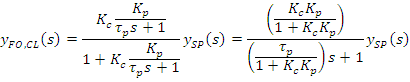 |
(IV.26) |
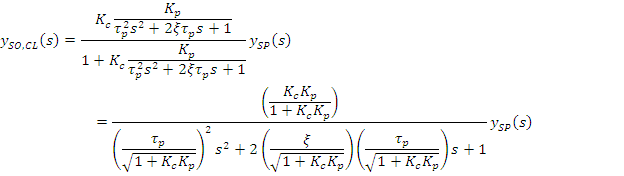 |
(IV.27) |
From the above equations, following conclusions can be arrived:
1. The order of the process does not change with a P controller.
2. Static gain of the processes are reduced.
3. The time constant of the first order process is reduced, i.e. the closed loop response is faster. The natural period of oscillation and damping factor of the second order process are also reduced, i.e., an overdamped process may become underdamped with P controller.