
Contents
Application of SAS In Optical Mouse
Working:
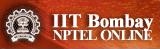
Optical mouse has a complete imaging system embedded in it. The mouse is essentially a tiny, high-speed video camera and image processor. Navigation sensors placed underneath the mouse start operating with a slight movement of the mouse. A light-emitting diode (LED) illuminates the surface underneath the mouse. The light from the LED reflects off microscopic textural features of the surface. A plastic lens collects the reflected light and forms an image on the sensor. The image as seen by a naked eye is a black and white picture of a tiny section of the surface. The sensor continuously takes pictures as the mouse moves. The sensor takes pictures quickly -1500 pictures (frames) per second or more -fast enough so that sequential pictures overlap.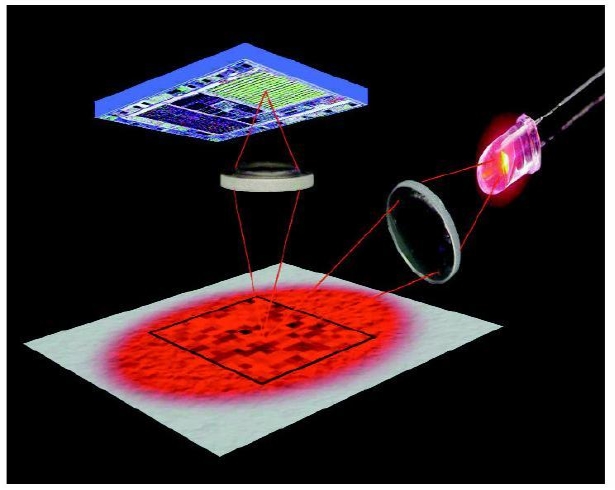
Optical mice illuminate an area of the work surface with an LED, to reveal a microscopic pattern of highlights and shadows. These patterns are reflected onto the navigation sensor, which takes pictures at a rate of 1500 images per second or more.The images are then sent to the optical navigation engine (Digital Signal Processor) for processing. The optical navigation engine is the brain of the mouse. It identifies texture or other features in the pictures and tracks their motion. Figure 2 illustrates how this is done.
The Navigation Engine identifies common features in sequential images to determine the direction and amount of mouse movement. Image B was taken while the mouse was moving, a short time after image A. It shows the same features as image A, only shifted down and to the left. Two images were captured sequentially as the mouse was panned to the right and upwards. Much of the same visual material can be recognized in both frames. Through a patented imageprocessing algorithm, the optical navigation engine identifies common features between the two frames and determines the distance between them. This information is then translated into X and Y coordinates to indicate mouse movements. The Central Processing Unit of the computer receives these coordinates and translates the received signals into the motion of the cursor on the monitor.
Expectations:
The mouse like any other device is expected to be user friendly i.e. one should be able to take the cursor to any required point on the screen in the least possible time and maximum accuracy with least effort. Now, here we have contradicting properties i.e. for satisfying one of these properties we have to compromise the other. Lets say we increase counts per inch (counts per inch gives the number of measurements taken by the mouse per inch, so increasing counts per inch increases the resolution and decreases the maximum speed at which mouse can be moved) so that we can reach a particular point in the higher accuracy, but since the maximum speed now has been restricted to a lower value time taken to move mouse over larger distances. But if we have low counts per inch then the maximum speed at which mouse can operate is increased but this happens at the cot of resolution. Now we loose the high accuracy we had earlier. Therefore in the optical mouse the have been adjusted to an optimum level which is the compromise of good speed and high accuracy.Advantage
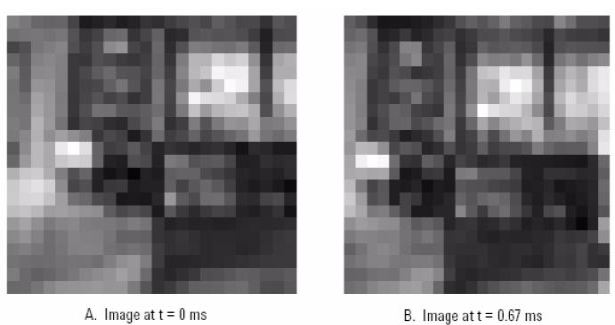
Any operator of the mouse takes the cursor to a particular point on the monitor in two basic steps - Taking the cursor in the neighborhood of the point and then- Taking the cursor to the exact location. Here the first operation does not requires a high accuracy hence for this part we move the mouse with a higher speed where as for the second part high accuracy is desired, so in this region we move the mouse slowly. In a mechanical mouse the distance traversed by the cursor on the screen maintains a fixed ratio with the distance moved by the mouse on the surface. Therefore in the case of a mechanical mouse, for the first part of the operation we have to move the mouse over a large distance with a high speed (if the ratio of distance moved by mouse to that moved by the cursor is low), and for second part we have to move the mouse very slowly to obtain high precision (if the ratio of distance moved by mouse to that moved by the cursor is high). Both of the above operations are uncomfortable. Whereas in case of the optical mouse when the mouse is moved fast the cursor moves by larger distance than it would move on moving the mouse slowly between the same two points on the surface(i.e. the speed of the cursor varies non linearly with the speed of mouse).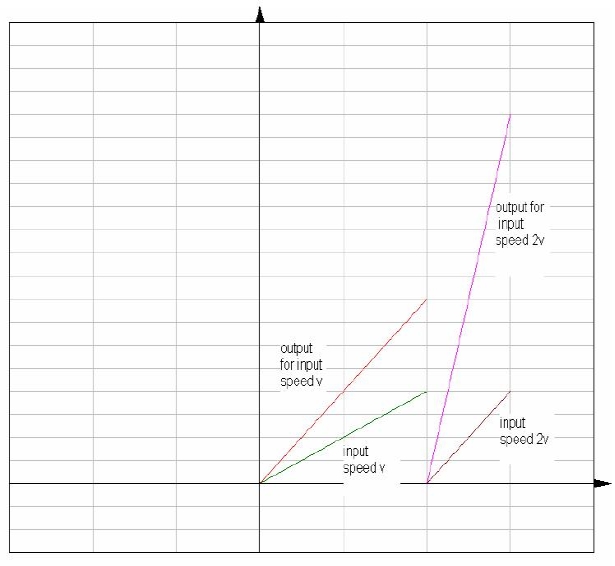
Shows non linear relation exists between input and output speeds
In the case of optical mouse, for first step of taking the mouse to a given location, one can bring mouse in the neighbourhood of the point by rapidly moving the mouse in the proper direction, (this operation does not requires a high efficiency). So for this part of the operation the cursor moves with much larger speed than the mouse. For the second part, that of taking the cursor to the precise position, we move the mouse slowly, which makes the cursor move slowly to bring it to the desired point. Hence, in case of optical mouse since speed of the cursor depends on the speed of the mouse, the operation of taking the cursor to the required point becomes efficient and easy.

