
Contents
Car Control System
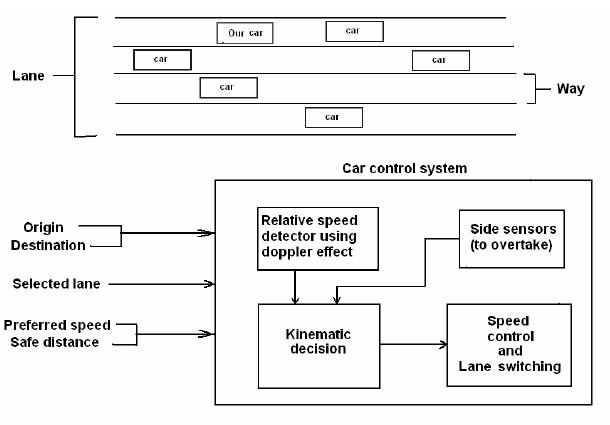
While moving in the lane, we use real-time control system to maneuver our vehicle through the
traffic. Suppose we are traveling in multiple-way lane, we have to take decision whether to
overtake by switching the lanes or not. Here we usually give as input our preferred speed of the
vehicle and also a minimum distance to be kept from other vehicles. We need a sensor on the
front side to know the relative speed of the car in front of us and sensors on the side to know
whether there is a vehicle in the neighboring way in the lane or not.
The sensor can be modeled on the principle of speed gun to get the relative velocity.
Speed Gun
To detect the relative speed of the car ahead of us we use laser gun technology. The basic principle behind this is that the speed gun emits a short burst of an infrared laser and receives the reflected signal (signal reflected from the car ahead).Now the gun counts the time taken for it to travel the round trip, this way we can estimate the distance (time calculated multiplied by the speed of light) between our car and the car ahead. To calculate the relative speed we just send many such pulses at some high rate and calculate the change in distance between the pulses and then divide it by the pulse rate. To attain greater accuracy one has to simply increase the rate at which infrared pulses are emitted.Now if the speed of the vehicle ahead of us is less than our speed then we look out for the possibility to overtake through input from side sensors. When overtaking is not possible (may be due to continuous traffic in the side lane), then we go for braking so as to avoid crashing into the vehicle. For braking we use speed control system as discussed below.
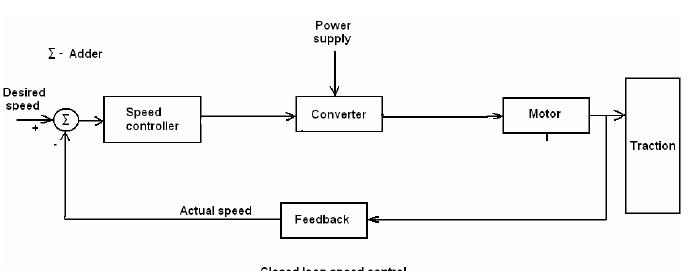
Speed control in a DC motor can be achieved by
1) Armature voltage control (Vt)
2) Field Control (Q)
3) Armature resistance control (Ra)
But here we consider only armature voltage control.
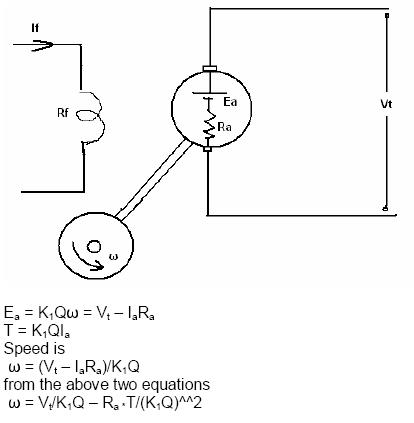
Armature voltage control:
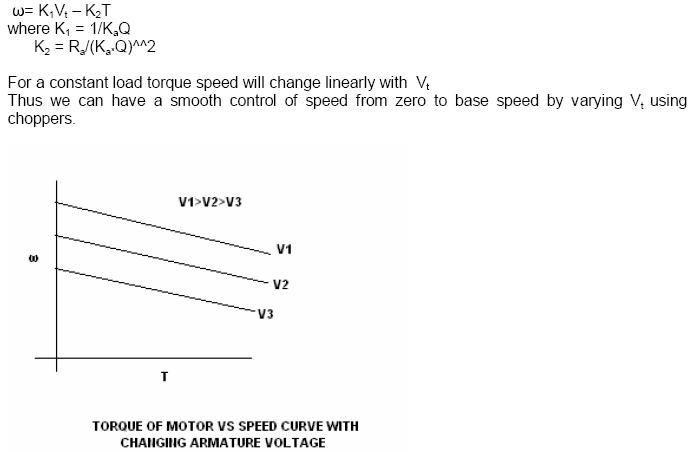
The speed is the intersection point between (motor torque vs speed) and (load torque vs speed). Load torque curve is got by solving a second order differential equation involving rotational inertia damping constant and spring constant.

