Nearly all industrial robots have mechanical joints that can be classified into following five types as shown in Figure 7.5.2.
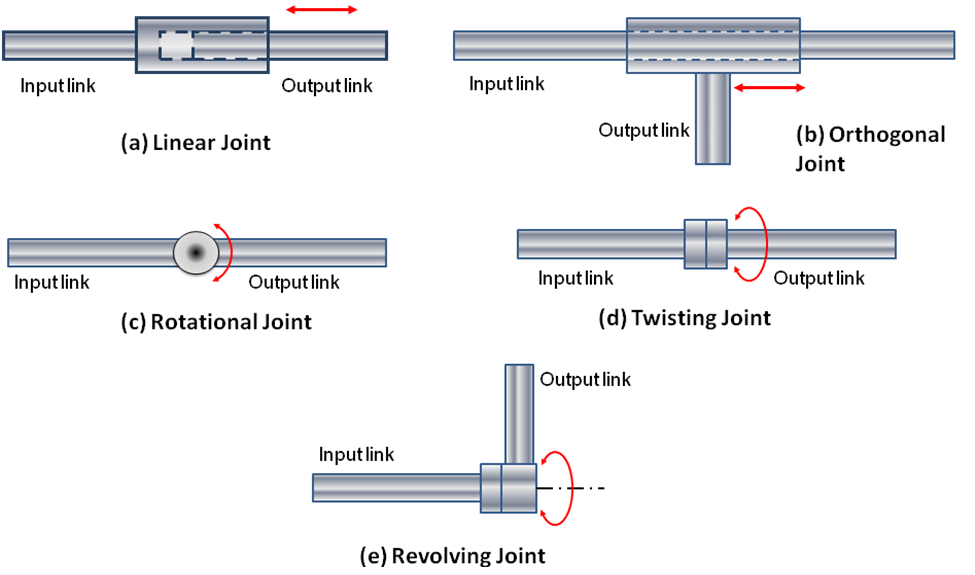 Fig. 7.5.2 Types of Joints
Fig. 7.5.2 Types of Joints
a) Linear joint (type L joint)
The relative movement between the input link and the output link is a translational sliding motion, with the axes of the two links being parallel.
b) Orthogonal joint (type U joint)
This is also a translational sliding motion, but the input and output links are perpendicular to each other during the move.
c) Rotational joint (type R joint)
This type provides rotational relative motion, with the axis of rotation perpendicular to the axes of the input and output links.
d) Twisting joint (type T joint)
This joint also involves rotary motion, but the axis or rotation is parallel to the axes of the two links.
e) Revolving joint (type V-joint, V from the “v” in revolving)
In this type, axis of input link is parallel to the axis of rotation of the joint. However the axis of the output link is perpendicular to the axis of rotation.